Lorsque la pandémie de COVID-19 a commencé, les constructeurs automobiles comme Ford ont rapidement modifié leurs priorités de production, passant des voitures aux masques et aux ventilateurs. Ces entreprises se sont appuyées sur les travailleurs des chaînes de montage pour effectuer ce changement. Les robots étant confinés à leurs activités de routine, il leur aurait été trop difficile d’effectuer cette transition. Si les pinces d’un robot pouvaient être modifiées en fonction de la tâche à accomplir, il pourrait théoriquement ramasser pratiquement n’importe quoi. Ces pinces pourraient être passives et saisir des objets sans en modifier la forme, comme les pinces d’un chariot élévateur, afin de réduire les coûts. Une équipe de l’université de Washington a mis au point un nouvel outil permettant de concevoir une pince passive imprimée en 3D et capable de déterminer la manière la plus efficace de saisir un objet.
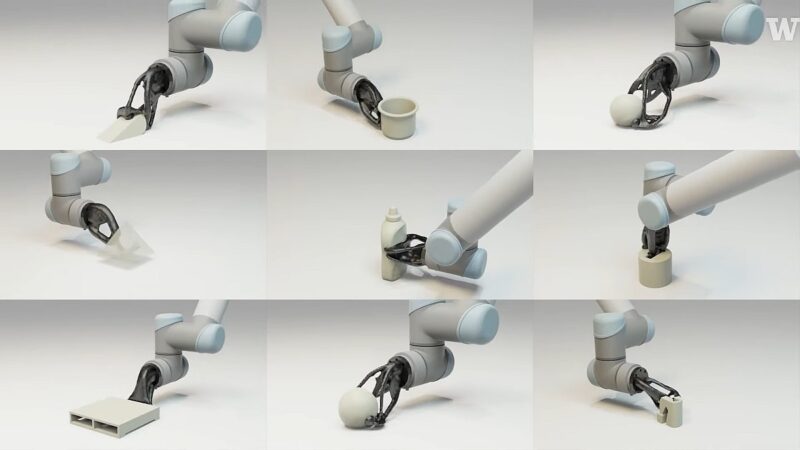
Les scientifiques ont mis cette technique à l’épreuve sur 22 objets, dont une perceuse, une balle de tennis, un coin en forme de butoir de porte et un lapin imprimé en 3D. Pour 20 de ces objets, les pinces et les parcours conçus ont fonctionné comme prévu. Le coin et une pyramide avec un trou de serrure incurvé étaient deux de ces objets. Ces deux formes sont difficiles à saisir pour différents types de pinces.
Ces résultats seront présentés par l’équipe le 11 août au SIGGRAPH 2022.
L’auteur principal, Adriana Schulz, a déclaré : ” Nous produisons encore la plupart de nos articles avec des chaînes de montage, qui sont vraiment formidables mais aussi très rigides. La pandémie nous a montré que nous devions trouver un moyen de réutiliser facilement ces lignes de production. Notre idée est de créer un outillage personnalisé pour ces lignes de fabrication. Cela nous donne un robot très simple qui peut effectuer une tâche avec une pince spécifique. Et quand je change la tâche, je remplace simplement la pince.”
Historiquement, comme les pinces passives ne peuvent pas être modifiées pour s’adapter aux objets qu’elles saisissent, les objets ont été fabriqués pour s’adapter à une pince particulière. Jeffrey Lipton, co-auteur de l’article et professeur adjoint d’ingénierie mécanique à l’Université de Washington, a déclaré que la pince d’un chariot élévateur était la pince passive la plus efficace au monde. Cependant, l’inconvénient est que les pinces des chariots élévateurs ne sont efficaces qu’avec des formes spécifiques, comme les palettes, “ce qui signifie que tout ce que vous voulez saisir doit être sur une palette”.
Si elle était mal conçue, une pince pouvait entrer en collision avec l’objet lors de sa préhension. Les chercheurs ont trouvé quelques idées cruciales pour résoudre ce problème. Pour que l’objet reste stable dans la pince, les points de contact de la pince avec l’objet sont essentiels. Cette disposition des points est connue sous le nom de configuration de la prise, a déclaré l’auteur principal de l’étude, Milin Kodnongbua, étudiant en première année à l’UW. M. Kodnongbua ajoute qu’en outre, la pince doit entrer en contact avec l’objet à ces endroits précis et relier ces points de contact au bras du robot comme une seule entité solide.
Pour construire une nouvelle pince et une nouvelle trajectoire, l’équipe a d’abord fourni à l’ordinateur un modèle 3D de l’objet et son orientation dans l’espace. Une fois que l’ordinateur a trouvé une correspondance satisfaisante, il a donné deux séries d’instructions – l’une contenant la trajectoire du bras du robot une fois la pince fabriquée et fixée, et l’autre contenant les instructions pour la fabrication de la pince par une imprimante 3D.