Si la boîte à outils Opportunity a pu susciter des années d’amour anthropomorphique et de bonne volonté, alors les Terriens seront certainement sensibles à l’idée d’envoyer un robot en forme de serpent sur la lune. Ce robot, fruit de l’imagination d’étudiants de la Northeastern University, est censé se tortiller sur un terrain difficile, mesurer l’eau dans le fond des cratères et se mordre la queue pour devenir un ouroboros tournoyant dévalant le flanc d’une falaise lunaire.
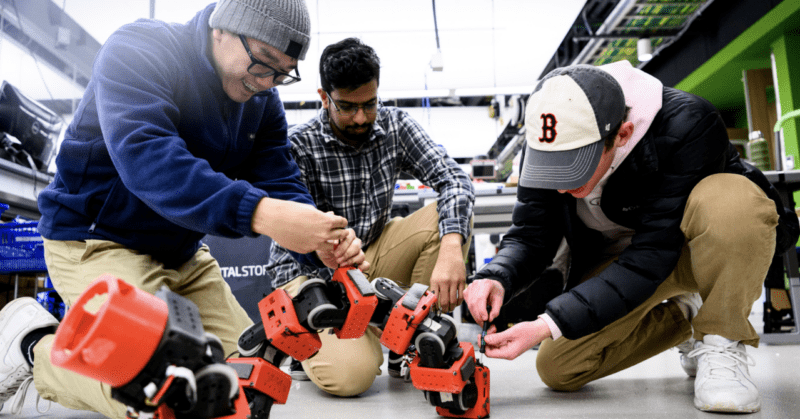
Le Big Idea Challenge de la NASA présente chaque année une nouvelle question axée sur un problème d’ingénierie que l’agence doit résoudre. À l’automne 2021, des étudiants d’universités de tous les États-Unis ont entrepris de concevoir un robot capable de survivre sur un terrain lunaire extrême et d’envoyer des données vers la Terre. L’équipe gagnante, composée d’étudiants du club Students for the Exploration and Development of Space de Northeastern, a remporté le premier prix en novembre et espère maintenant transformer son projet en un prototype avancé qui pourrait être envoyé sur la Lune.
Grâce à un financement de 180 000 dollars de la NASA, les étudiants se sont concentrés sur la conception d’un robot capable de naviguer dans le cratère Shackleton, un bassin de 13 miles de large situé près du pôle sud lunaire, où la NASA a confirmé la présence de glace d’eau en 2018. L’eau est abondante sur Terre, mais c’est une denrée de grande valeur en dehors de notre atmosphère. Les humains ont besoin d’eau pour survivre, mais elle est extrêmement lourde, et la trimbaler à 240 000 miles de chez soi est un coût prohibitif. L’eau locale sous forme de glace serait donc un atout considérable pour la mission Artemis de la NASA, qui cherche à établir une base lunaire.
Cependant, avant que l’agence puisse compter sur cette glace pour des missions avec équipage, elle doit confirmer la quantité d’eau présente dans les différentes régions de la surface lunaire et sa composition chimique. Mais l’obtention de données à partir d’un cratère de 3 km de profondeur présente quelques difficultés. Premièrement, le sol est dans l’ombre en permanence, ce qui signifie que les températures oscillent à des centaines de degrés sous le point de congélation. Deuxièmement, l’angle d’inclinaison entre le bord et le fond est de 30,5 degrés, plus raide que le mont Everest. Troisièmement : La lune est sablonneuse. Tout robot tentant de traverser ce terrain devra survivre à des températures glaciales, à une descente abrupte et à un environnement sablonneux.
Les étudiants ont envisagé des robots sauteurs, à pattes et roulants, comme les rovers à roues déjà présents sur Mars. Mais les robots à roulettes s’enfonceraient dans le régolithe et ne pourraient pas naviguer en toute sécurité sur un terrain aussi escarpé que l’anneau de Shackleton. Les robots à pattes s’enfoncent également et sont moins stables dans les environnements sablonneux. Les robots sauteurs auraient du mal à se lancer et à atterrir sans subir de dommages ou rester coincés. “Nous avons examiné toute cette série de modèles de robots différents et nous nous sommes demandé s’il n’y avait pas moyen de combiner différentes locomotions”, se souvient Yash Bhora, étudiant en physique qui a participé à la conception du logiciel de l’équipe.
Bhora et ses coéquipiers ont envisagé un robot culbuteur, qui pourrait exploiter la gravité partielle de la lune pour se propulser plus efficacement dans le cratère. Mais une fois arrivé au sol, il aurait besoin d’un autre type de fonctionnalité. “Un robot culbuteur ne peut pas vraiment manipuler un gros instrument scientifique ou manœuvrer avec autant de précision qu’un robot marcheur”, explique Matthew Schroeter, le chef de l’équipe, qui a obtenu son diplôme de Northeastern en 2022 et travaille désormais chez Honeybee Robotics.