Nous semblons être câblés pour calculer non pas le chemin le plus court mais le plus « pointu », nous faisant face le plus possible vers notre destination.
Tout le monde sait que la distance la plus courte entre deux points est une ligne droite. Cependant, lorsque vous marchez dans les rues de la ville, une ligne droite peut ne pas être possible. Comment décidez-vous de la voie à suivre ?
Un nouveau AVEC Une étude suggère que notre cerveau n’est en fait pas optimisé pour calculer le soi-disant « chemin le plus court » lors de la navigation à pied. Sur la base d’un ensemble de données de plus de 14 000 personnes vaquant à leur vie quotidienne, l’équipe du MIT a découvert qu’au lieu de cela, les piétons semblaient choisir les chemins qui semblent pointer le plus directement vers leur destination, même si ces itinéraires finissent par être plus longs. Ils appellent cela le « chemin le plus pointu ».
Cette stratégie, connue sous le nom de navigation vectorielle, a également été observée dans les études sur les animaux, des insectes aux primates. L’équipe du MIT suggère que la navigation vectorielle, qui nécessite moins de matière grise que le calcul de l’itinéraire le plus court, pourrait avoir évolué pour permettre au cerveau de consacrer plus de puissance à d’autres tâches.
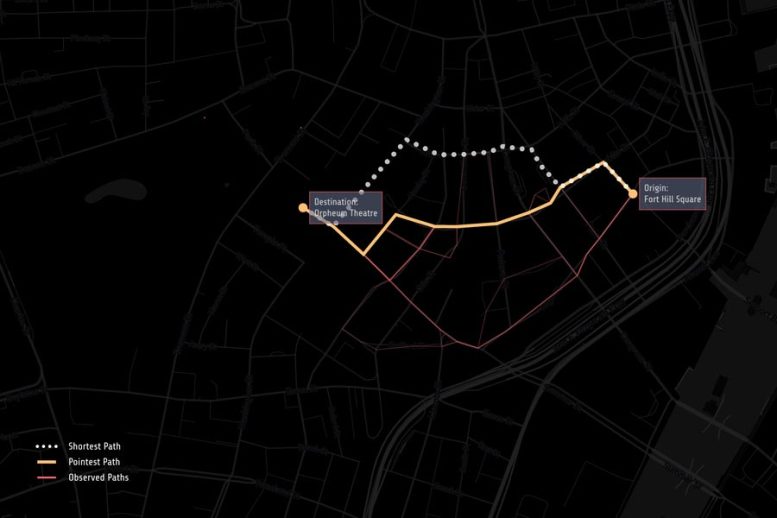
Une étude du MIT suggère que notre cerveau n’est pas optimisé pour calculer l’itinéraire le plus court possible lors de la navigation à pied. Sur cette figure, les chemins piétonniers observés sont indiqués en rouge tandis que le chemin le plus pointu est en jaune et le chemin le plus court est une ligne pointillée. Crédit : Figure reproduite avec l’aimable autorisation des chercheurs
“Il semble y avoir un compromis qui permet à la puissance de calcul de notre cerveau d’être utilisée pour d’autres choses – il y a 30 000 ans, pour éviter un lion, ou maintenant, pour éviter un SUV dangereux”, explique Carlo Ratti, professeur de technologies urbaines à Département d’études urbaines et de planification du MIT et directeur du laboratoire Senseable City. « La navigation vectorielle ne produit pas le chemin le plus court, mais elle est suffisamment proche du chemin le plus court et il est très simple de le calculer. »
Ratti est l’auteur principal de l’étude, qui a été publiée le 18 octobre 2021 dans Science informatique de la nature. Christian Bongiorno, professeur agrégé à l’Université Paris-Saclay et membre du Senseable City Laboratory du MIT, est l’auteur principal de l’étude. Joshua Tenenbaum, professeur de sciences cognitives computationnelles au MIT et membre du Center for Brains, Minds, and Machines et du Computer Science and Artificial Intelligence Laboratory (CSAIL), est également l’auteur de l’article.
Navigation vectorielle
Il y a vingt ans, alors qu’il était étudiant diplômé à l’Université de Cambridge, Ratti parcourait presque tous les jours la route entre son collège résidentiel et son bureau départemental. Un jour, il s’est rendu compte qu’il empruntait en fait deux itinéraires différents – l’un pour se rendre au bureau et un autre légèrement différent pour le retour.
“Sûrement un itinéraire était plus efficace que l’autre, mais j’avais dérivé en en adaptant deux, un pour chaque direction”, explique Ratti. “J’étais constamment incohérent, une réalisation petite mais frustrante pour un étudiant consacrant sa vie à la pensée rationnelle.”
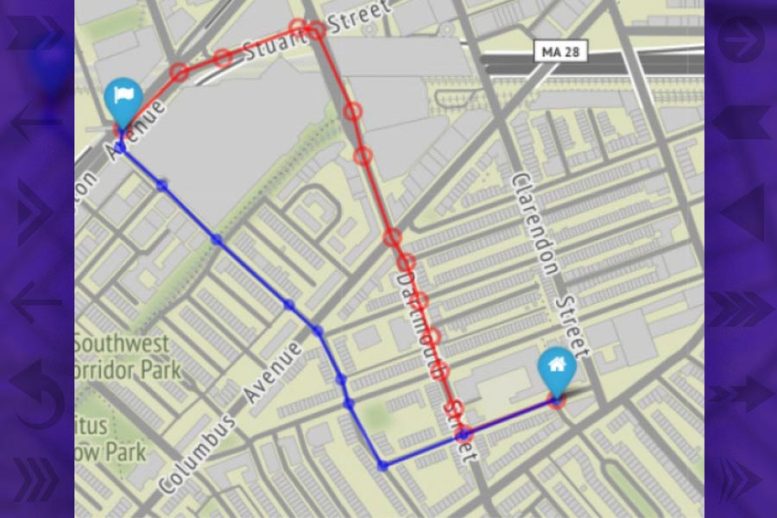
Carte des rues de la ville ; le chemin piétonnier commun est marqué en rouge et le chemin le plus court est en bleu. Une étude du MIT suggère que notre cerveau n’est pas optimisé pour calculer l’itinéraire le plus court possible lors de la navigation à pied. Sur cette figure, les chemins piétons sont représentés en rouge tandis que le chemin le plus court est en bleu. Crédit : Figure reproduite avec l’aimable autorisation des chercheurs et éditée par MIT News
Au Senseable City Laboratory, l’un des intérêts de recherche de Ratti est l’utilisation de grands ensembles de données provenant d’appareils mobiles pour étudier le comportement des gens dans les environnements urbains. Il y a plusieurs années, le laboratoire a acquis un ensemble de données de signaux GPS anonymisés provenant de téléphones portables de piétons alors qu’ils traversaient Boston et Cambridge, dans le Massachusetts, sur une période d’un an. Ratti pensait que ces données, qui comprenaient plus de 550 000 chemins empruntés par plus de 14 000 personnes, pourraient aider à répondre à la question de savoir comment les gens choisissent leurs itinéraires lorsqu’ils naviguent dans une ville à pied.
L’analyse des données par l’équipe de recherche a montré qu’au lieu de choisir les itinéraires les plus courts, les piétons ont choisi des itinéraires légèrement plus longs mais minimisant leur écart angulaire par rapport à la destination. C’est-à-dire qu’ils choisissent des chemins qui leur permettent de faire face plus directement à leur point final lorsqu’ils commencent l’itinéraire, même si un chemin qui a commencé par se diriger davantage vers la gauche ou la droite pourrait en fait être plus court.
“Au lieu de calculer des distances minimales, nous avons constaté que le modèle le plus prédictif n’était pas celui qui trouvait le chemin le plus court, mais plutôt celui qui essayait de minimiser le déplacement angulaire – pointant directement vers la destination autant que possible, même si voyager à des angles plus grands serait être réellement plus efficace », explique Paolo Santi, chercheur principal au Senseable City Lab et au Conseil national italien de la recherche, et auteur correspondant de l’article. “Nous avons proposé d’appeler cela le chemin le plus pointu.”
Cela était vrai pour les piétons à Boston et Cambridge, qui ont un réseau de rues alambiqué, et à San Francisco, qui a une disposition de rue en grille. Dans les deux villes, les chercheurs ont également observé que les gens avaient tendance à choisir des itinéraires différents lorsqu’ils effectuaient un aller-retour entre deux destinations, tout comme Ratti l’avait fait à l’époque de ses études supérieures.
« Lorsque nous prenons des décisions en fonction de l’angle par rapport à la destination, le réseau routier vous mènera à un chemin asymétrique », explique Ratti. « Sur la base de milliers de marcheurs, il est très clair que je ne suis pas le seul : les êtres humains ne sont pas des navigateurs optimaux. »
Se déplacer dans le monde
Des études sur le comportement animal et l’activité cérébrale, en particulier dans l’hippocampe, ont également suggéré que les stratégies de navigation du cerveau sont basées sur le calcul de vecteurs. Ce type de navigation est très différent des algorithmes informatiques utilisés par votre smartphone ou votre appareil GPS, qui peuvent calculer presque parfaitement l’itinéraire le plus court entre deux points, sur la base des cartes stockées dans leur mémoire.
Sans accès à ce genre de cartes, le cerveau animal a dû trouver des stratégies alternatives pour naviguer entre les emplacements, explique Tenenbaum.
« Vous ne pouvez pas télécharger dans le cerveau une carte détaillée basée sur la distance, alors comment allez-vous faire autrement ? La chose la plus naturelle pourrait être d’utiliser des informations qui nous sont plus disponibles à partir de notre expérience », dit-il. « Penser en termes de points de référence, de points de repère et d’angles est un moyen très naturel de créer des algorithmes pour cartographier et naviguer dans l’espace en fonction de ce que vous apprenez de votre propre expérience de déplacement dans le monde. »
« Alors que les smartphones et l’électronique portable associent de plus en plus l’intelligence humaine et artificielle, il devient de plus en plus important de mieux comprendre les mécanismes de calcul utilisés par notre cerveau et leur relation avec ceux utilisés par les machines », explique Ratti.
Référence : « Vector-based piéton navigation in cities » par Christian Bongiorno, Yulun Zhou, Marta Kryven, David Theurel, Alessandro Rizzo, Paolo Santi, Joshua Tenenbaum et Carlo Ratti, 18 octobre 2021, Science informatique de la nature.
DOI : 10.1038 / s43588-021-00130-y
La recherche a été financée par le MIT Senseable City Lab Consortium ; Centre du MIT pour les cerveaux, les esprits et les machines ; la Fondation nationale des sciences ; le fonds MISTI/MITOR ; et la Compagnia di San Paolo.