L’exploration planétaire, en particulier au sein de notre propre système solaire, a fourni toute une vie de connaissances scientifiques sur les nombreux mondes au-delà de la Terre. Cependant, cette exploration, jusqu’à présent, s’est principalement limitée aux orbiteurs et aux atterrisseurs/rovers conçus pour l’exploration en surface des corps célestes qu’ils visitent. Mais que se passerait-il si nous pouvions explorer les environnements souterrains aussi facilement que nous avons pu explorer la surface, et certaines de ces habitations souterraines pourraient-elles non seulement abriter de futurs astronautes, mais également abriter la vie ?
Ce sont des questions auxquelles une équipe de chercheurs de l’Université de l’Arizona (UArizona) espère répondre en examinant de nouvelles technologies qui pourraient potentiellement aider l’exploration humaine et robotique des environnements souterrains planétaires, y compris les tubes de lave, les grottes de lave et même les océans souterrains. Cette recherche intervient à un moment particulièrement unique avec les missions Artemis de la NASA qui se préparent à renvoyer des humains sur la Lune en 2025, puis, espérons-le, sur Mars, un jour.
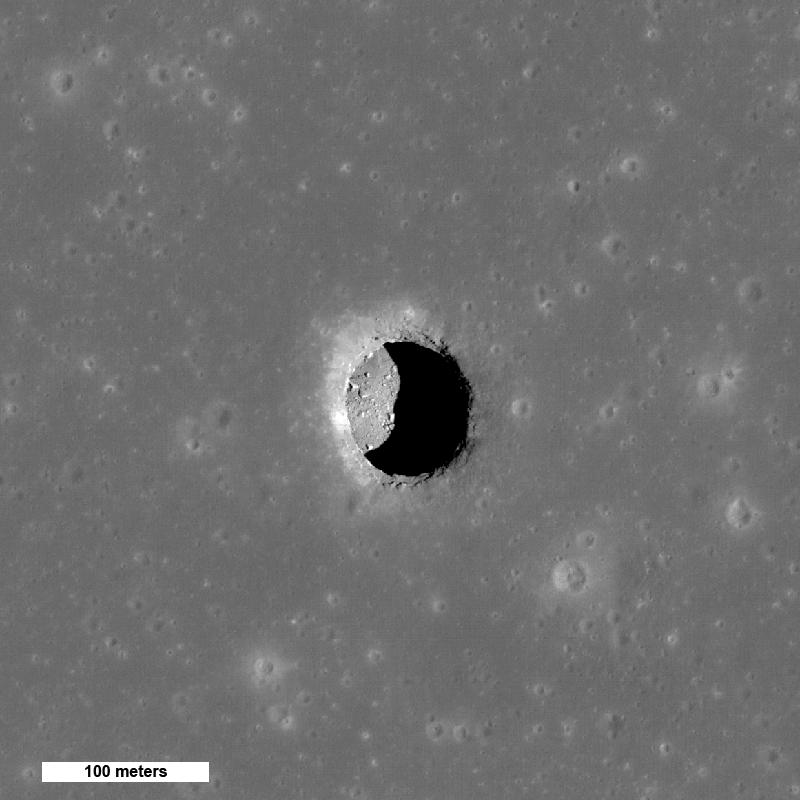
« Les tubes de lave et les grottes feraient des habitats parfaits pour les astronautes car vous n’avez pas à construire de structure ; vous êtes protégé des rayonnements cosmiques nocifs, il vous suffit donc de le rendre joli et confortable », a déclaré le Dr Wolfgang Fink, professeur agrégé de génie électrique et informatique à l’UArizona et auteur principal de l’étude.
Pour l’étude, les chercheurs ont introduit un réseau de communication déployé dynamiquement (DDCN) qui connecte sans fil les robots explorateurs via un réseau topologique maillé qui permet non seulement à chaque robot explorateur de travailler de manière autonome, mais aussi en équipe, car le réseau leur accorde une communication sans entrave avec chacun. autre. Ce type de système est essentiel car la structure géologique explorée pourrait ne pas être en mesure de relayer les commandes de signal radio des astronautes à l’extérieur vers les robots explorateurs à l’intérieur, de sorte qu’un système autonome pourrait être la meilleure option pour réussir la mission. Les chercheurs se réfèrent au DDCN comme un réseau de communication “de style fil d’Ariane inspiré de Hansel & Gretel” basé sur la façon dont le système est utilisé.
“Si vous vous souvenez du livre, vous savez comment Hansel et Gretel ont laissé tomber des miettes de pain pour s’assurer qu’ils retrouveraient leur chemin”, a expliqué le Dr Fink, qui est également le fondateur et directeur du laboratoire de recherche sur les systèmes d’exploration visuelle et autonome de Caltech. et UArizona. “Dans notre scénario, les” fils d’Ariane “sont des capteurs miniaturisés qui se superposent aux rovers, qui déploient les capteurs lorsqu’ils traversent une grotte ou un autre environnement souterrain.”
Outre les perspectives d’abriter les astronautes, les tubes de lave et les grottes de lave pourraient également présenter une pertinence astrobiologique, car un article de 2020 suggérait que la vie potentielle pourrait évoluer dans de tels environnements protégés du rayonnement cosmique agressif.

Cette étude s’appuie sur des recherches antérieures entreprises par le Dr Fink, connues sous le nom de reconnaissance évolutive à plusieurs niveaux, cette étude créant une sorte de chaîne de commandement pour les robots explorateurs sans intervention de contrôleurs humains. Par exemple, un orbiteur contrôlerait de manière autonome un dirigeable qui traverse la surface, qui contrôle de manière autonome un ou plusieurs rovers ou atterrisseurs effectuant des tâches directement au sol.
Un tel système autonome, semblable à une chaîne de commandement, est déjà testé sur le rover Perseverance de la NASA alors qu’il commande son homologue hélicoptère, Ingenuity. Une mission proposée pour explorer la lune de Saturne, Titan, aurait potentiellement impliqué ce système autonome et aurait impliqué un orbiteur, un ballon et un atterrisseur pour explorer les mers d’hydrocarbures et de méthane de Titan. Malheureusement, la mission n’a pas été sélectionnée en raison d’un manque de financement.
Bien qu’elle n’ait pas été sélectionnée, la mission Titan proposée démontre l’un des avantages de l’approche de type fil d’Ariane en ce sens que les explorateurs robotiques utilisant cette méthode sont capables d’explorer à la fois sous terre et sous l’eau. Le Dr Fink a noté que bien que cette technologie puisse s’avérer utile pour les efforts de recherche et de sauvetage en cas de catastrophe naturelle, il a également déclaré que l’un des plus grands défis est de transmettre les données de l’environnement souterrain vers la surface. Mais le but du concept DCCN est de surmonter ce problème.
“Une fois déployés, nos capteurs établissent automatiquement un réseau maillé non dirigé, ce qui signifie que chaque nœud se met à jour sur chaque nœud qui l’entoure”, a déclaré le Dr Fink, qui a présenté pour la première fois l’idée DDCN dans une proposition de 2019 à la NASA.
“Ils peuvent basculer entre eux et compenser les points morts et les pannes de signal”, a déclaré le Dr Mark A. Tarbell, chercheur principal au laboratoire du Dr Fink et co-auteur de l’étude. “Si certains d’entre eux meurent, il y a toujours une connectivité via les nœuds restants, de sorte que le rover mère ne perd jamais la connexion au nœud le plus éloigné du réseau.”
Pour les explorateurs robotiques sous-marins, l’atterrisseur au-dessus de la surface – qu’il flotte sur un lac Titan ou repose sur la glace d’Europe – serait connecté au submersible via un long câble avec des nœuds de communication qui pourraient amplifier tout signal essayant de revenir à l’atterrisseur . Les nœuds individuels pourraient également avoir la capacité de collecter eux-mêmes des données, telles que la température, la pression et la salinité, et de prendre les données dans le câble et de les renvoyer à l’atterrisseur, note le Dr Fink.
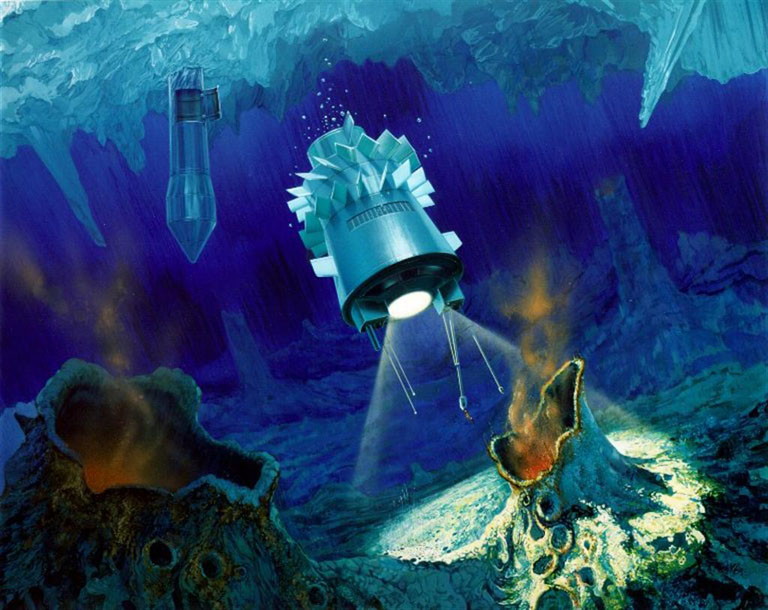
“Imaginez que vous vous rendiez jusqu’à Europe, que vous fondiez à travers des kilomètres de glace, que vous descendiez dans l’océan souterrain, où vous vous retrouvez entouré de vie extraterrestre, mais vous n’avez aucun moyen de faire remonter les données à la surface, », a déclaré le Dr Fink. “C’est le scénario que nous devons éviter.”
Il y a eu plusieurs propositions pour envoyer un atterrisseur et même un submersible sur Europa, mais rien n’a encore été approuvé.
Comment les tubes de lave aideront-ils l’exploration humaine et robotique future alors que l’humanité s’aventure plus loin dans le cosmos, et ces environnements souterrains pourraient-ils abriter la vie ? Seul le temps nous le dira, et c’est pourquoi nous faisons de la science !
Comme toujours, continuez à faire de la science et continuez à regarder vers le haut !