Les astéroïdes se présentent sous de nombreuses formes et tailles. La plupart sont sphériques, bien que beaucoup aient une caractéristique qui peut les rendre difficiles à atterrir – ce ne sont essentiellement que des collections de roches lâchement liées par la gravité. Dans le jargon de l’exploration spatiale, ils sont connus sous le nom de “tas de décombres”. De nombreux astéroïdes visités par l’humanité sont considérés comme des tas de décombres, notamment Itokawa et Dimorphos, les destinations respectives de Hayabusa et DART. Mais, comme l’ont montré les essais de la sonde Philae lorsqu’elle tentait de rejoindre la comète 67P/Churyumov-Gerasimenko, atterrir sur ces objets à très faible gravité de surface peut être difficile. Entrez dans un nouveau concept des chercheurs de l’Université du Colorado à Boulder. Leur idée, connue sous le nom de Area-of-Effect Softbots (AoES), pourrait aider les futurs explorateurs d’astéroïdes, et même les mineurs, à surmonter certains des défis auxquels ils sont confrontés sur ces petits corps.
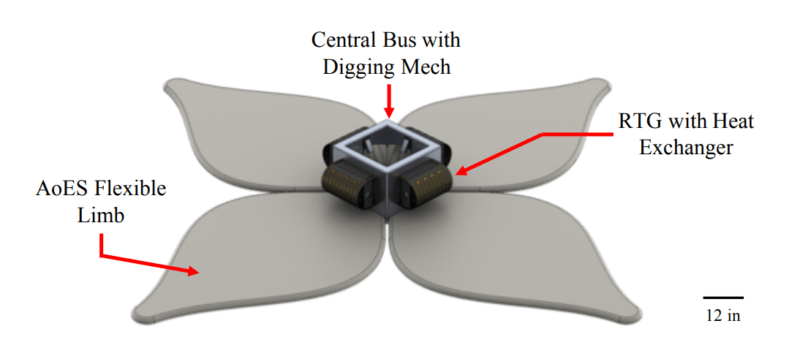
PI Jay McMahon et son équipe ont effectué le travail initialement soutenu par une subvention de phase I de l’Institut des concepts avancés de la NASA (NIAC) en 2017. Leur idée était simple : concevoir un robot qui pourrait coller à un objet avec une très faible gravité tout en introduisant une machine qui pourrait creuser dans l’astéroïde pour trouver des matériaux précieux, qu’il s’agisse de glace d’eau ou de métaux précieux.
Cela semble beaucoup plus facile qu’il ne l’est, cependant. Les astéroïdes ont une gravité notoirement faible, de sorte que les engins spatiaux ont dû recourir à des systèmes d’ancrage, qui ne fonctionnent que parfois (encore une fois, voir l’expédition rebondissante de Philae). Plus important encore, une fois que le vaisseau spatial est ancré quelque part, il n’est pas facile de repartir ou de manœuvrer vers une autre partie du même astéroïde.
C’est là qu’intervient l’idée des softbots. De nombreux prototypes de robots à corps déformables sont en cours de développement ici sur Terre. Ils sont généralement utiles dans la recherche et le sauvetage ou dans des environnements dangereux comme les réacteurs nucléaires. Mais les utiliser dans l’espace, en particulier lors d’interactions avec des astéroïdes, est une idée nouvelle.
Les softbots ont quatre avantages principaux par rapport aux autres types de vaisseaux spatiaux lorsqu’ils interagissent avec un astéroïde. Ils peuvent adhérer à la surface mieux que la plupart. Une fois à la surface, ils peuvent y ramper. Ils peuvent également se propulser hors de la surface en “sautant”. Et enfin, ils peuvent se rediriger vers un autre endroit de l’astéroïde à l’aide d’une simple voile solaire.
Tout d’abord, abordons l’adhérence – les robots mous peuvent avoir une grande surface, et cette surface peut être constituée de presque n’importe quel matériau flexible. La façon dont ce matériau adhère à la surface de l’astéroïde est une considération importante pour l’AoES. En règle générale, un astéroïde a une gravité de surface suffisamment petite pour qu’une autre force soit la force principale qui maintient le tas de décombres ensemble. Connue sous le nom de force de van der Waals, elle exerce une force à chaque point de contact entre les rochers. L’adhésion utilise une méthode similaire, permettant à la partie « molle » du robot d’adhérer à la surface de l’astéroïde.
Alors qu’un AoES pourrait utiliser sa propre force de van der Waals pour coller à l’astéroïde, il mettra également en œuvre une force connue sous le nom d ‘«électroadhérence» qui utilise des électrodes dans la partie flexible du robot pour induire une charge en elles, qui induit alors également une charge opposée à la surface. Cela permet au bras du robot « d’adhérer » à la surface en utilisant la force de liaison des charges électriques opposées, fixant ainsi plus fortement le robot à la surface de l’astéroïde.
Mais que se passe-t-il s’il ne veut pas rester collé à la surface de l’astéroïde ? Une option consiste à ramper le long de cette surface, et AoES peut le faire. La conception discutée dans le rapport final du Dr McMahon pour NIAC utilise un type d’actionneur connu sous le nom d’actionneur HASEL. Ceux-ci permettent au robot de faire adhérer une partie de son appendice (disons la pointe) à l’astéroïde tout en contractant une autre partie (disons le milieu), lui permettant ainsi de ramper le long de la surface de l’astéroïde tout en maintenant un contact constant avec la surface.
Si ce mode de transport ne suffit pas, l’AoES pourrait littéralement passer à son prochain emplacement. Dans une méthode similaire à «ramper», contrôler sélectivement quelle partie du membre doit forcer l’électroadhésion pendant qu’une autre partie se contracte, mais dans ce cas, la contraction est rapidement relâchée en même temps que l’électroadhésion est arrêtée, permettant ainsi à l’AoES de repousser l’astéroïde et de revenir dans l’espace qui l’entoure. Si cela est fait correctement, cela pourrait même permettre à l’AoES de manœuvrer vers sa prochaine cible sur l’astéroïde en utilisant uniquement les forces qu’il a mises dans son propre saut.
Mais si cela ne fonctionne pas, l’AoES a un autre avantage : il peut se transformer en voile solaire. Un robot AoES peut utiliser efficacement la lumière pour se pousser dans une direction donnée en étendant complètement ses appendices. Donc, si un opérateur (ou l’IA du robot) veut manœuvrer vers un endroit différent plus loin qu’un saut ne pourrait le prendre, il se manœuvre simplement en utilisant la lumière du soleil pour s’y rendre. Ces techniques s’écartent radicalement des méthodologies des atterrisseurs à petit corps existants, représentant un bond en avant dans les opérations sur les astéroïdes.
Alors, que ferait un AoES quand il y arriverait ? Dans le concept discuté dans l’article du NIAC, son objectif principal est d’alimenter en matériau un système de collecte central, où il est soit broyé, soit vaporisé et peut ensuite être transporté vers un plus grand navire de traitement en orbite autour de l’astéroïde. En fait, plusieurs systèmes AoES pourraient être actifs sur un astéroïde à un moment donné, et ils pourraient tous renvoyer du matériel à leur vaisseau-mère.
Ces capacités, et sa flexibilité d’avoir plus d’un système sur un astéroïde donné à la fois, rendent le système AoES particulièrement attrayant en tant que solution pour l’extraction d’astéroïdes de tas de décombres. Cependant, il ne semble pas que l’AoES ait été sélectionné pour un deuxième cycle de financement du NIAC en 2018, bien que les recherches du Dr McMahon et de son équipe soient stables depuis lors, y compris des articles sur la façon d’utiliser l’AoES en orbite terrestre basse ou pour dévier un astéroïde potentiellement dangereux. Peut-être que l’idée était juste un peu tôt pour son époque, et nous pourrions très bien voir des dizaines ou des centaines de robots à corps flexible grouiller sur un astéroïde potentiellement rentable dans un avenir pas trop lointain.