Des physiciens ont découvert une nouvelle façon d’enrober des robots mous de matériaux qui leur permettent de se déplacer et de fonctionner de manière plus ciblée.
Des physiciens ont découvert une nouvelle façon de revêtir des robots mous de matériaux qui leur permettent de se déplacer et de fonctionner de manière plus efficace. La recherche, menée par l’Université de Bath, est décrite dans un article publié le 11 mars 2022 dans le journal de l’Université de Bath. Science Advances.
Les auteurs de l’étude estiment que leur modélisation révolutionnaire de la “matière active” pourrait marquer un tournant dans la conception des robots. En développant davantage le concept, il pourrait être possible de déterminer la forme, le mouvement et le comportement d’un solide mou non pas par son élasticité naturelle, mais par une activité contrôlée par l’homme sur sa surface.
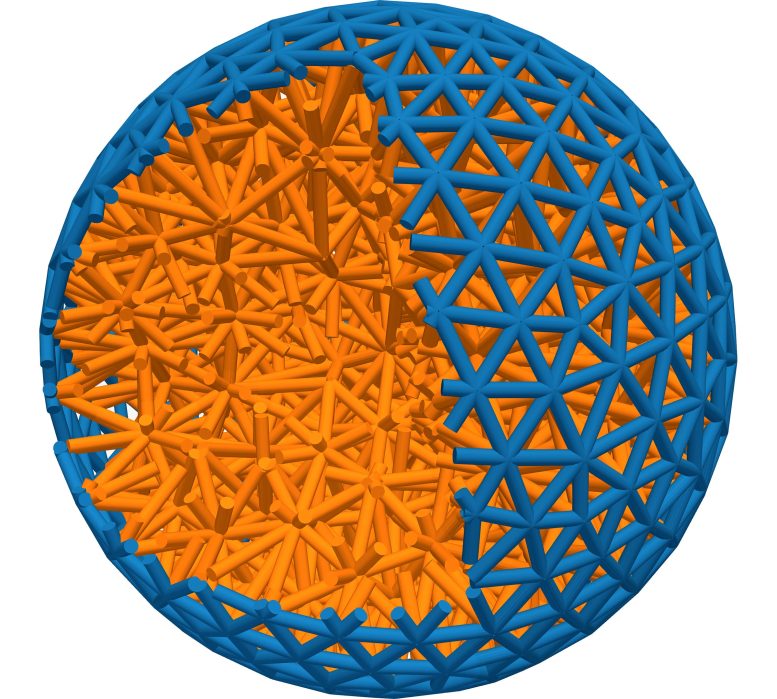
Envelopper une balle élastique (orange) dans une couche de petits robots (bleu) permet aux chercheurs de programmer la forme et le comportement. Crédit : Jack Binysh
La surface d’un matériau mou ordinaire se rétrécit toujours pour former une sphère. Pensez à la façon dont l’eau perle en gouttelettes : le perlage se produit parce que la surface des liquides et autres matériaux mous se contracte naturellement en une surface aussi petite que possible, c’est-à-dire une sphère. Mais la matière active peut être conçue pour aller à l’encontre de cette tendance. Par exemple, une balle en caoutchouc enveloppée d’une couche de nano-robots, où les robots sont programmés pour travailler à l’unisson afin de déformer la balle en une nouvelle forme prédéterminée (par exemple, une étoile).
On espère que la matière active conduira à une nouvelle génération de machines dont le fonctionnement viendra du bas vers le haut. Ainsi, au lieu d’être régies par un contrôleur central (comme les bras robotisés d’aujourd’hui sont contrôlés dans les usines), ces nouvelles machines seraient constituées de nombreuses unités actives individuelles qui coopèrent pour déterminer le mouvement et le fonctionnement de la machine. Cela s’apparente au fonctionnement de nos propres tissus biologiques, comme les fibres du muscle cardiaque.
Grâce à cette idée, les scientifiques pourraient concevoir des machines souples dotées de bras en matériaux flexibles actionnés par des robots intégrés à leur surface. Ils pourraient également adapter la taille et la forme des capsules d’administration de médicaments, en recouvrant la surface des nanoparticules d’un matériau actif et réactif.. Cela pourrait avoir un effet spectaculaire sur la façon dont un médicament interagit avec les cellules de l’organisme.
Les travaux sur la matière active remettent en question l’hypothèse selon laquelle le coût énergétique de la surface d’un liquide ou d’un solide mou doit toujours être positif, car une certaine quantité d’énergie est toujours nécessaire pour créer une surface.
Le Dr Jack Binysh, premier auteur de l’étude, a déclaré : “La matière active nous fait regarder les règles familières de la nature – des règles comme le fait que la tension de surface doit être positive – sous un nouvel angle. Voir ce qui se passe si nous brisons ces règles, et comment nous pouvons exploiter les résultats, est un endroit passionnant pour faire de la recherche.”
L’auteur correspondant, le Dr Anton Souslov, ajoute : “Cette étude est une preuve importante du concept et a de nombreuses implications utiles. Par exemple, les technologies futures pourraient permettre de produire des robots mous beaucoup plus minces et plus efficaces pour saisir et manipuler des matériaux délicats.”
Pour cette étude, les chercheurs ont développé une théorie et des simulations qui décrivent un solide mou en 3D dont la surface subit des contraintes actives. Ils ont constaté que ces contraintes actives étendent la surface du matériau, entraînant avec elles le solide sous-jacent et provoquant un changement de forme global. Les chercheurs ont découvert que la forme précise adoptée par le solide pouvait alors être adaptée en modifiant les propriétés élastiques du matériau.
Dans la prochaine phase de ce travail – qui a déjà commencé – les chercheurs appliqueront ce principe général pour concevoir des robots spécifiques, tels que des bras mous ou des matériaux auto-nageurs. Ils se pencheront également sur le comportement collectif – par exemple, ce qui se passe lorsqu’on a de nombreux solides actifs, tous emballés ensemble.
Référence : “Active elastocapillarity in soft solids with negative surface tension” par Jack Binysh, Thomas R. Wilks et Anton Souslov, 11 mars 2022, Science Advances.
DOI : 10.1126/sciadv.abk3079
Ce travail est le fruit d’une collaboration entre les universités de Bath et de Birmingham. Il a été financé par l’Engineering and Physical Sciences Research Council (EPSRC) par le biais du New Investigator Award no. EP/T000961/1.