Les chercheurs du MIT ont mis au point une nouvelle technique de fabrication qui leur permet de produire des actionneurs souples à basse tension, à haute densité de puissance et à haute endurance pour un microrobot aérien. Crédit : Avec l’aimable autorisation des chercheurs
Une nouvelle technique de fabrication produit des muscles artificiels à basse tension et à forte densité énergétique qui améliorent les performances des microrobots volants.
Quand il s’agit de robots, plus gros n’est pas toujours mieux. Un jour, un essaim de robots de la taille d’un insecte pourrait polliniser un champ de cultures ou rechercher des survivants parmi les décombres d’un bâtiment effondré.
AVEC les chercheurs ont démontré des drones de petite taille qui peuvent se déplacer avec une agilité et une résilience semblables à celles d’un bogue, qui pourraient éventuellement effectuer ces tâches. Les actionneurs souples qui propulsent ces microrobots sont très durables, mais ils nécessitent des tensions beaucoup plus élevées que les actionneurs rigides de taille similaire. Les robots poids plume ne peuvent pas transporter l’électronique de puissance nécessaire qui leur permettrait de voler par eux-mêmes.
Aujourd’hui, ces chercheurs ont mis au point une technique de fabrication qui leur permet de construire des actionneurs souples qui fonctionnent avec une tension 75 % inférieure à celle des versions actuelles tout en transportant 80 % de charge utile en plus. Ces actionneurs souples sont comme des muscles artificiels qui battent rapidement les ailes du robot.
Cette nouvelle technique de fabrication produit des muscles artificiels avec moins de défauts, ce qui prolonge considérablement la durée de vie des composants et augmente les performances et la charge utile du robot.
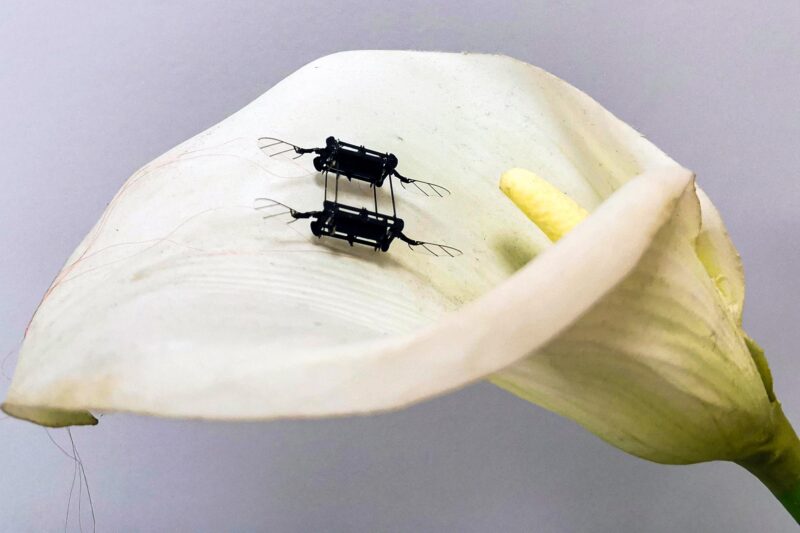
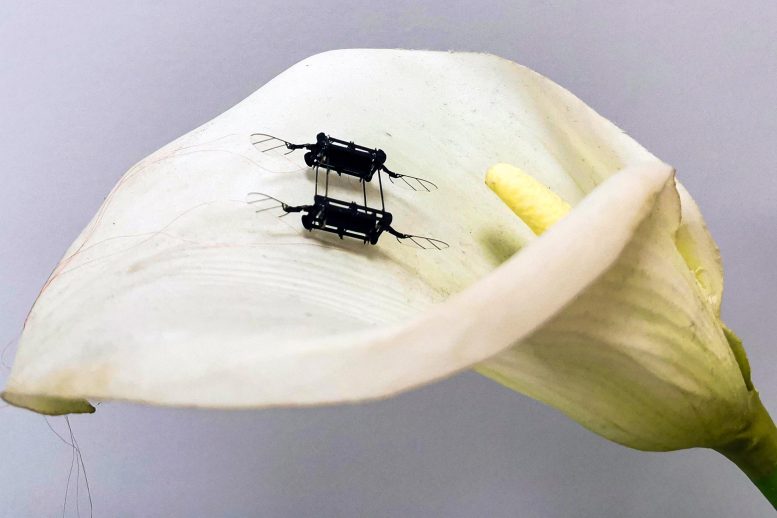
Les muscles artificiels améliorent considérablement la charge utile du robot et lui permettent d’atteindre les meilleures performances de vol stationnaire de sa catégorie. Crédit : Kevin Chen
« Cela ouvre de nombreuses opportunités à l’avenir pour nous de passer à l’électronique de puissance sur le microrobot. Les gens ont tendance à penser que les robots mous ne sont pas aussi capables que les robots rigides. Nous démontrons que ce robot, pesant moins d’un gramme, vole le plus longtemps avec la plus petite erreur lors d’un vol stationnaire. Le message à retenir est que les robots mous peuvent dépasser les performances des robots rigides », explique Kevin Chen, qui est le professeur adjoint D. Reid Weedon, Jr. ’41 au département de génie électrique et d’informatique, le chef du Soft and Micro Robotics Laboratory du Laboratoire de recherche en électronique (RLE), et auteur principal de l’article.
Les co-auteurs de Chen incluent Zhijian Ren et Suhan Kim, co-auteurs principaux et étudiants diplômés de l’EECS ; Xiang Ji, chercheur à l’EECS ; Weikun Zhu, un étudiant diplômé en génie chimique ; Farnaz Niroui, maître de conférences à l’EECS ; et Jing Kong, professeur à EECS et chercheur principal à RLE. La recherche a été acceptée pour publication dans Matériaux avancés et fait partie de la série Rising Stars du journal, qui récompense les travaux exceptionnels de chercheurs en début de carrière.
Faire des muscles
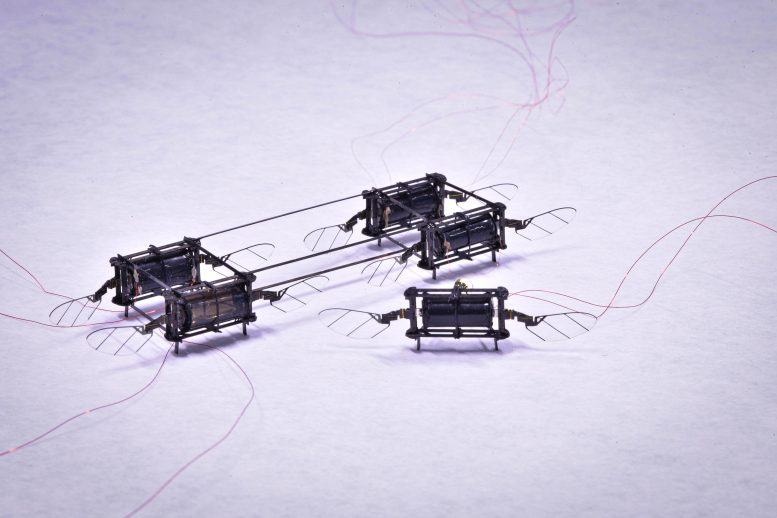
Le microrobot rectangulaire, qui pèse moins d’un quart de centime, possède quatre ensembles d’ailes qui sont chacune entraînées par un actionneur souple. Ces actionneurs en forme de muscle sont fabriqués à partir de couches d’élastomère qui sont prises en sandwich entre deux électrodes très minces, puis enroulées dans un cylindre spongieux. Lorsqu’une tension est appliquée à l’actionneur, les électrodes serrent l’élastomère et cette contrainte mécanique est utilisée pour battre l’aile.
Plus la surface de l’actionneur est grande, moins la tension est requise. Ainsi, Chen et son équipe construisent ces muscles artificiels en alternant autant de couches ultrafines d’élastomère et d’électrode que possible. Au fur et à mesure que les couches d’élastomère s’amincissent, elles deviennent plus instables.
Pour la première fois, les chercheurs ont pu créer un actionneur avec 20 couches, chacune d’une épaisseur de 10 micromètres (environ le diamètre d’un globule rouge). Mais ils ont dû réinventer des parties du processus de fabrication pour y arriver.
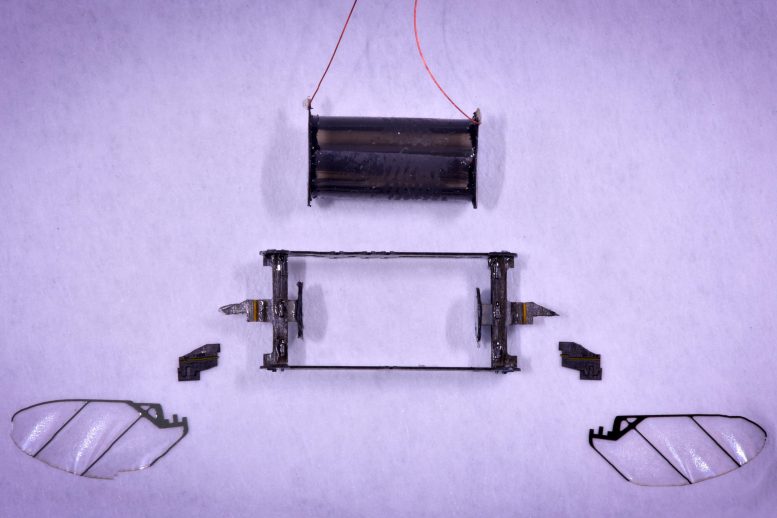
Le microrobot rectangulaire, qui pèse moins d’un quart de centime, possède quatre ensembles d’ailes qui sont chacune entraînées par un actionneur souple. Crédit : Avec l’aimable autorisation des chercheurs
Un obstacle majeur est venu du processus de revêtement par centrifugation. Pendant le revêtement par centrifugation, un élastomère est versé sur une surface plane et tourné rapidement, et la force centrifuge tire le film vers l’extérieur pour le rendre plus mince.
« Dans ce processus, l’air revient dans l’élastomère et crée de nombreuses bulles d’air microscopiques. Le diamètre de ces bulles d’air est d’à peine 1 micromètre, donc auparavant, nous les ignorions en quelque sorte. Mais lorsque vous obtenez des couches de plus en plus fines, l’effet des bulles d’air devient de plus en plus fort. C’est traditionnellement la raison pour laquelle les gens n’ont pas été en mesure de fabriquer ces couches très minces », explique Chen.
Lui et ses collaborateurs ont découvert que s’ils effectuaient un processus d’aspiration immédiatement après le revêtement par centrifugation, alors que l’élastomère était encore humide, les bulles d’air étaient éliminées. Ensuite, ils font cuire l’élastomère pour le sécher.
La suppression de ces défauts augmente la puissance de sortie de l’actionneur de plus de 300 % et améliore considérablement sa durée de vie, explique Chen.
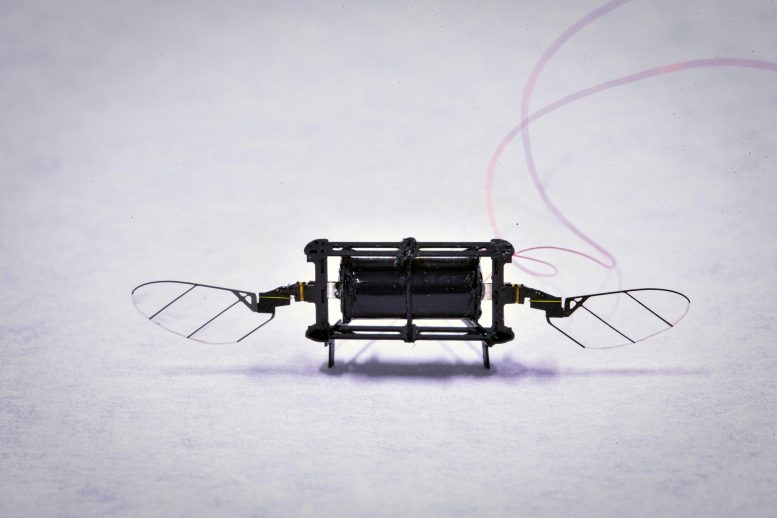
“Nous démontrons que ce robot, pesant moins d’un gramme, vole le plus longtemps avec la plus petite erreur lors d’un vol stationnaire”, explique Kevin Chen. Crédit : Avec l’aimable autorisation des chercheurs
Les chercheurs ont également optimisé les électrodes minces, qui sont composées de nanotubes de carbone, des rouleaux de carbone super résistants qui font environ 1/50 000 du diamètre d’un cheveu humain. Des concentrations plus élevées de nanotubes de carbone augmentent la puissance de sortie de l’actionneur et réduisent la tension, mais les couches denses contiennent également plus de défauts.
Par exemple, les nanotubes de carbone ont des extrémités pointues et peuvent percer l’élastomère, ce qui provoque un court-circuit de l’appareil, explique Chen. Après de nombreux essais et erreurs, les chercheurs ont trouvé la concentration optimale.
Un autre problème vient de l’étape de durcissement – à mesure que de plus en plus de couches sont ajoutées, l’actionneur prend de plus en plus de temps à sécher.
« La première fois que j’ai demandé à mon élève de fabriquer un actionneur multicouche, une fois arrivé à 12 couches, il a dû attendre deux jours pour qu’il durcisse. Ce n’est absolument pas durable, surtout si vous souhaitez passer à plus de couches », explique Chen.
Ils ont découvert que la cuisson de chaque couche pendant quelques minutes immédiatement après le transfert des nanotubes de carbone sur l’élastomère réduit le temps de durcissement à mesure que de nouvelles couches sont ajoutées.
Les meilleures performances de sa catégorie
Après avoir utilisé cette technique pour créer un muscle artificiel à 20 couches, ils l’ont testé par rapport à leur version précédente à six couches et à des actionneurs rigides à la pointe de la technologie.
Au cours des expériences de décollage, l’actionneur à 20 couches, qui nécessite moins de 500 volts pour fonctionner, a exercé suffisamment de puissance pour donner au robot un rapport poids/poussière de 3,7 à 1, afin qu’il puisse transporter des objets qui sont près de trois fois son poids. .
Ils ont également démontré un vol stationnaire de 20 secondes, qui, selon Chen, est le plus long jamais enregistré par un robot sub-gramme. Leur robot en vol stationnaire tenait sa position de manière plus stable que n’importe lequel des autres. L’actionneur à 20 couches fonctionnait toujours sans à-coups après avoir été entraîné pendant plus de 2 millions de cycles, dépassant de loin la durée de vie des autres actionneurs.
« Il y a deux ans, nous avons créé l’actionneur le plus puissant et il pouvait à peine voler. Nous avons commencé à nous demander si les robots mous pouvaient rivaliser avec les robots rigides ? Nous avons observé un défaut après l’autre, nous avons donc continué à travailler et nous avons résolu un problème de fabrication après l’autre, et maintenant les performances de l’actionneur souple rattrapent leur retard. Ils sont même un peu meilleurs que les rigides à la pointe de la technologie. Et il existe encore un certain nombre de procédés de fabrication en science des matériaux que nous ne comprenons pas. Je suis donc très enthousiaste à l’idée de continuer à réduire la tension d’actionnement », dit-il.
Chen a hâte de collaborer avec Niroui pour construire des actionneurs dans une salle blanche au MIT.nano et tirer parti des techniques de nanofabrication. Maintenant, son équipe est limitée à la finesse des couches en raison de la poussière dans l’air et d’une vitesse maximale de revêtement par centrifugation. Le travail en salle blanche élimine ce problème et leur permettrait d’utiliser des méthodes, telles que le doctor blade, plus précises que le spin coating.
Alors que Chen est ravi de produire des couches d’actionneurs de 10 micromètres, son espoir est de réduire l’épaisseur à seulement 1 micromètre, ce qui ouvrirait la porte à de nombreuses applications pour ces robots de la taille d’un insecte.
Référence : « Micro-Aerial-Robot High Lift Powered by Low Voltage and Long Endurance Dielectric Elastomer Actuators » par Zhijian Ren, Suhan Kim, Xiang Ji, Weikun Zhu, Farnaz Niroui, Jing Kong et Yufeng Chen, 28 novembre 2021, Matériaux avancés.
DOI : 10.1002/adma.202106757
Ce travail est soutenu, en partie, par le MIT Research Laboratory of Electronics et une bourse d’études supérieures Mathworks.