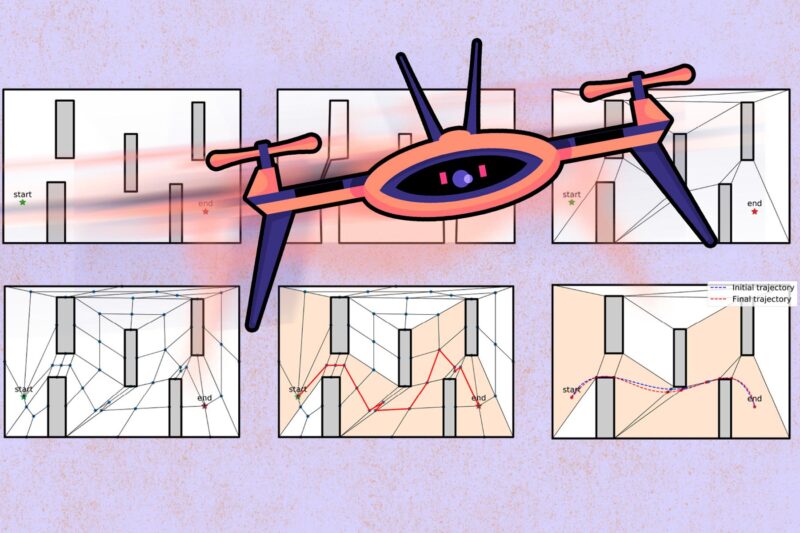
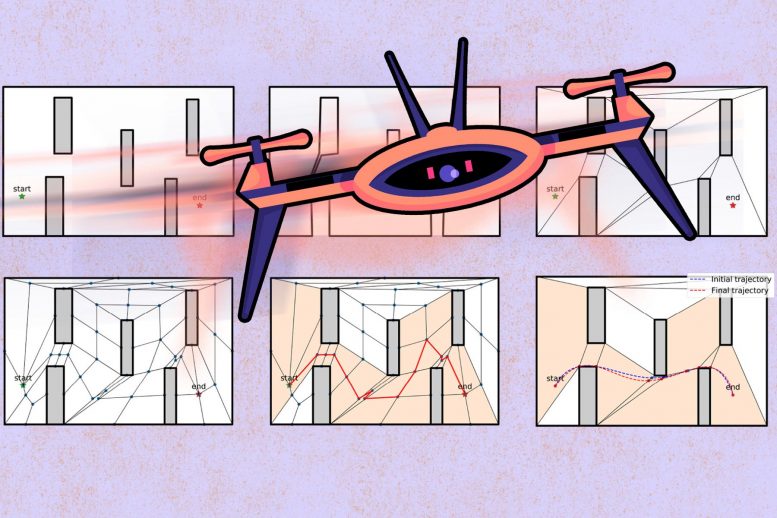
Les ingénieurs aérospatiaux du MIT ont conçu un algorithme qui aide les drones à trouver l’itinéraire le plus rapide autour des obstacles, sans s’écraser. Crédit: MIT News, avec la figure de fond gracieuseté des chercheurs
Un nouvel algorithme pourrait permettre à des drones rapides et agiles d’effectuer des opérations urgentes telles que la recherche et le sauvetage.
Si vous suivez les courses de drones autonomes, vous vous souvenez probablement autant des accidents que des victoires. Dans les courses de drones, les équipes s’affrontent pour voir quel véhicule est le mieux entraîné pour voler le plus rapidement à travers un parcours d’obstacles. Mais plus les drones volent vite, plus ils deviennent instables, et à grande vitesse, leur aérodynamique peut être trop compliquée à prévoir. Les accidents sont donc un phénomène courant et souvent spectaculaire.
Mais s’ils peuvent être poussés à être plus rapides et plus agiles, les drones pourraient être utilisés dans des opérations urgentes au-delà de la course, par exemple pour rechercher des survivants lors d’une catastrophe naturelle.
Aujourd’hui, les ingénieurs en aérospatiale de AVEC ont conçu un algorithme qui aide les drones à trouver l’itinéraire le plus rapide autour des obstacles sans s’écraser. Le nouvel algorithme combine des simulations d’un drone survolant un parcours d’obstacles virtuel avec des données d’expériences d’un vrai drone survolant le même parcours dans un espace physique.

Un quadricoptère survole un parcours de course à travers plusieurs portes afin de trouver la trajectoire la plus rapide possible. Crédit : Avec l’aimable autorisation des chercheurs
Les chercheurs ont découvert qu’un drone entraîné avec leur algorithme survolait un simple parcours d’obstacles jusqu’à 20 % plus vite qu’un drone entraîné sur des algorithmes de planification conventionnels. Fait intéressant, le nouvel algorithme n’a pas toujours gardé un drone en avance sur son concurrent tout au long du parcours. Dans certains cas, il a choisi de ralentir un drone pour gérer une courbe délicate, ou d’économiser son énergie pour accélérer et finalement dépasser son rival.
« À haute vitesse, il existe une aérodynamique complexe qui est difficile à simuler, nous utilisons donc des expériences dans le monde réel pour combler ces trous noirs afin de trouver, par exemple, qu’il serait peut-être préférable de ralentir d’abord pour être plus rapide plus tard. » dit Ezra Tal, un étudiant diplômé du département d’aéronautique et d’astronautique du MIT. « C’est cette approche holistique que nous utilisons pour voir comment nous pouvons établir une trajectoire globale aussi rapidement que possible. »
“Ces types d’algorithmes sont une étape très précieuse pour permettre aux futurs drones de naviguer très rapidement dans des environnements complexes”, ajoute Sertac Karaman, professeur agrégé d’aéronautique et d’astronautique et directeur du Laboratoire des systèmes d’information et de décision au MIT. “Nous espérons vraiment repousser les limites de manière à ce qu’ils puissent voyager aussi vite que leurs limites physiques le permettent.”
Tal, Karaman et Gilhyun Ryou, étudiant diplômé du MIT, ont publié leurs résultats dans le Journal international de recherche en robotique.
Effets rapides
Entraîner les drones à contourner les obstacles est relativement simple s’ils sont censés voler lentement. En effet, l’aérodynamique telle que la traînée n’entre généralement pas en jeu à basse vitesse et peut être exclue de toute modélisation du comportement d’un drone. Mais à grande vitesse, ces effets sont beaucoup plus prononcés et la conduite des véhicules est beaucoup plus difficile à prévoir.
“Quand vous volez vite, il est difficile d’estimer où vous êtes”, dit Ryou. « Il pourrait y avoir des retards dans l’envoi d’un signal à un moteur, ou une chute de tension soudaine qui pourrait causer d’autres problèmes de dynamique. Ces effets ne peuvent pas être modélisés avec des approches de planification traditionnelles.
Pour comprendre comment l’aérodynamique à grande vitesse affecte les drones en vol, les chercheurs doivent effectuer de nombreuses expériences en laboratoire, en définissant des drones à différentes vitesses et trajectoires pour voir lesquels volent rapidement sans s’écraser – un processus de formation coûteux et souvent induisant un crash .
Au lieu de cela, l’équipe du MIT a développé un algorithme de planification de vol à grande vitesse qui combine des simulations et des expériences, d’une manière qui minimise le nombre d’expériences nécessaires pour identifier des trajectoires de vol rapides et sûres.
Les chercheurs ont commencé avec un modèle de planification de vol basé sur la physique, qu’ils ont développé pour d’abord simuler le comportement probable d’un drone lorsqu’il survole un parcours d’obstacles virtuel. Ils ont simulé des milliers de scénarios de course, chacun avec une trajectoire de vol et un schéma de vitesse différents. Ils ont ensuite indiqué si chaque scénario était réalisable (sûr) ou infaisable (entraînant un crash). À partir de ce graphique, ils pourraient rapidement se concentrer sur une poignée des scénarios les plus prometteurs, ou des trajectoires de course, à essayer en laboratoire.
« Nous pouvons faire cette simulation basse fidélité à moindre coût et rapidement, pour voir des trajectoires intéressantes qui pourraient être à la fois rapides et réalisables. Ensuite, nous effectuons des expériences sur ces trajectoires pour voir lesquelles sont réellement réalisables dans le monde réel », explique Tal. “En fin de compte, nous convergeons vers la trajectoire optimale qui nous donne le temps le plus bas possible.”
Aller lentement pour aller vite
Pour démontrer leur nouvelle approche, les chercheurs ont simulé un drone volant sur un parcours simple avec cinq grands obstacles de forme carrée disposés en quinconce. Ils ont mis en place cette même configuration dans un espace d’entraînement physique et programmé un drone pour parcourir le parcours à des vitesses et des trajectoires qu’ils avaient préalablement choisies dans leurs simulations. Ils ont également suivi le même cours avec un drone entraîné sur un algorithme plus conventionnel qui n’intègre pas d’expériences dans sa planification.
Dans l’ensemble, le drone entraîné sur le nouvel algorithme a « gagné » chaque course, terminant le parcours en un temps plus court que le drone entraîné de manière conventionnelle. Dans certains scénarios, le drone gagnant a terminé le parcours 20 % plus rapidement que son concurrent, même s’il a pris une trajectoire avec un départ plus lent, par exemple en prenant un peu plus de temps pour s’incliner dans un virage. Ce type d’ajustement subtil n’a pas été effectué par le drone entraîné de manière conventionnelle, probablement parce que ses trajectoires, basées uniquement sur des simulations, ne pouvaient pas entièrement tenir compte des effets aérodynamiques que les expériences de l’équipe ont révélés dans le monde réel.
Les chercheurs prévoient de réaliser davantage d’expériences, à des vitesses plus rapides et dans des environnements plus complexes, afin d’améliorer encore leur algorithme. Ils peuvent également incorporer des données de vol provenant de pilotes humains qui pilotent des drones à distance et dont les décisions et les manœuvres pourraient aider à se concentrer sur des plans de vol encore plus rapides mais toujours réalisables.
“Si un pilote humain ralentit ou prend de la vitesse, cela pourrait informer ce que fait notre algorithme”, explique Tal. « Nous pouvons également utiliser la trajectoire du pilote humain comme point de départ, et améliorer à partir de cela, pour voir ce que les humains ne font pas, que notre algorithme peut comprendre, pour voler plus vite. Ce sont des idées futures auxquelles nous réfléchissons.
Référence : « Optimisation de la boîte noire multi-fidélité pour des manœuvres de quadrotor optimales dans le temps » par Gilhyun Ryou, Ezra Tal et Sertac Karaman, 29 juillet 2021, Journal international de recherche en robotique.
DOI : 10.1177/02783649211033317
Cette recherche a été financée, en partie, par l’Office of Naval Research des États-Unis.