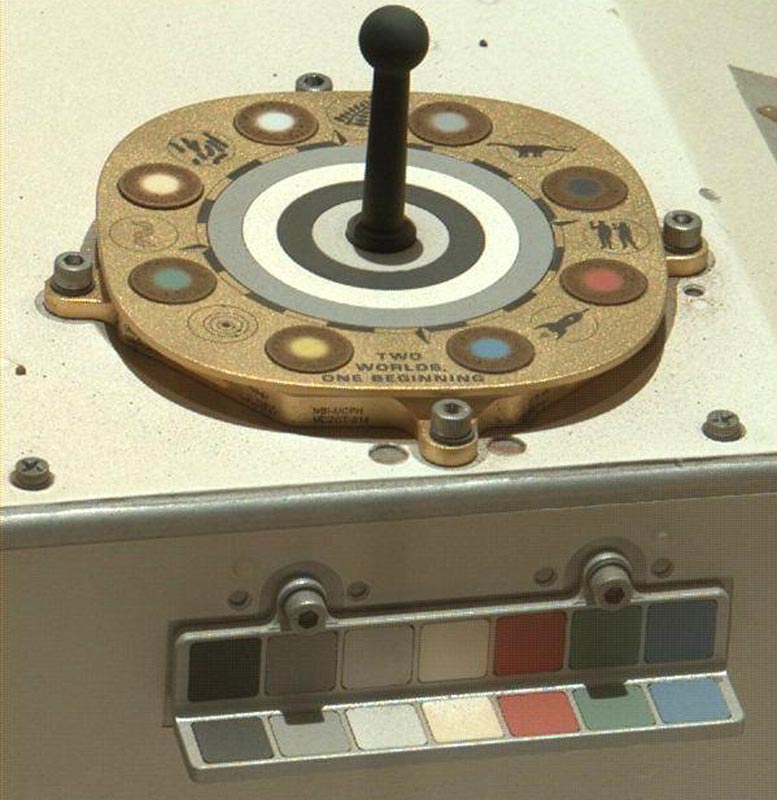
Le rover Mars Perseverance de la NASA a acquis cette image à l’aide de sa caméra Left Mastcam-Z. Mastcam-Z est une paire de caméras situées en haut du mât du rover. Crédit : NASA/JPL-Caltech/ASU
Un avion a un pilote. Un bus a un chauffeur. Un train a un conducteur. Mais qui contrôle un Mars vagabond? Au cours des sept dernières années où j’ai piloté des engins spatiaux à la fois en orbite et à la surface de Mars, je suis revenu à maintes reprises sur la question de savoir qui est le plus responsable du démarrage d’un engin spatial.
Est-ce l’ACE qui envoie les commandes au Deep Space Network (DSN) à envoyer au vaisseau spatial ? Mais ils n’ont pas écrit les commandes. Alors est-ce le responsable scientifique Payload Uplink qui les a écrits ? Mais ils ne les ont écrits qu’en texte brut, qu’un rover ne peut pas lire. Peut-être que c’est l’ingénieur d’intégration de séquence qui les a convertis en un fichier binaire que le rover pourrait comprendre ? Mais ils ne comprennent pas la nuance de comment ou où pointer un instrument ou combien de temps exposer le détecteur de la caméra afin d’obtenir les images nettes avec lesquelles nous sommes devenus si familiers, et ils ne peuvent pas non plus pointer une antenne vers Mars comme un DSN. l’opérateur doit. Peut-être que le rover se contrôle avec son automatisation embarquée sophistiquée. Ou ce crédit devrait-il aller au développeur du logiciel de vol qui a écrit les algorithmes ?
Après sept ans à réfléchir à cette question et à en discuter avec des collègues, la meilleure réponse que je puisse donner est celle-ci : nous le sommes tous et aucun de nous ne l’est.
En tant que l’un des milliers d’ingénieurs et de scientifiques qui ont travaillé sur Persévérance, j’en suis venu à voir le projet comme une fourmilière. Tout comme aucune fourmi n’est assez intelligente ou assez forte pour construire une fourmilière toute seule, aucun d’entre nous n’est assez intelligent ou assez capable pour concevoir, construire, tester ou faire fonctionner un rover martien par nous-mêmes. Au lieu de cela, nous comptons sur l’expertise, la diversité et notre expérience durement acquise à travers les divers succès et échecs de nos carrières. Aucun de nous n’est assez intelligent pour faire tout le travail. Même la somme de nos intelligences n’est pas suffisante. Au lieu de cela, tout comme avec une colonie de fourmis, nous ne faisons le travail que grâce à l’intelligence émergente qui découle de chaque petite interaction que nous avons les uns avec les autres, nous rendant meilleurs que la somme de nos parties.
Au cours du dernier mois, cela a été pleinement affiché car nous avons chargé une nouvelle version du logiciel de vol, sélectionné la prochaine cible d’échantillon de carotte à l’affleurement « Brac » et foré à cet endroit. Il ne pourrait en être autrement car chacune de ces tâches est complexe, nécessite une expertise dans des compétences très différentes et prend beaucoup plus d’heures qu’une seule personne ou même une seule équipe pourrait gérer.
Travailler sur un système aussi complexe que Persévérance est une leçon d’humilité et d’admiration. Aussi profondément que je comprends mon propre travail, la conception du rover et la façon dont nous l’exploitons, il y a tellement plus que je ne sais pas. Et il y en aura toujours. Mais ce n’est pas un problème car là où s’arrêtent mes connaissances, celles d’un collègue commencent. De cette façon, le rover est bien plus qu’un robot sur Mars. C’est une extension des esprits et de la communauté d’ingénieurs et de scientifiques qui y ont travaillé. C’est un phare brillant de la conscience humaine sur un autre monde.
Écrit par Matt Muszynski, ingénieur en systèmes de véhicules chez Nasa/JPL.