Comprendre la physique à l’arrière des processus naturels offre de nouvelles applications uniquement pour la robotique douce, l’automatisation de la production.
Marcher avec un expresso est quelque chose que beaucoup d’entre nous font tous les jours sans tenir compte de l’action d’équilibrage que cela nécessite. En fait, il y a beaucoup de physique pour éviter que le café ne déborde.
Le café, le liquide thermiquement agité contenu dans un verre, a des exemples internes de liberté qui se connectent à la tasse, qui interagit généralement à son tour en utilisant le porteur humain.
“Alors que les humains ont une capacité naturelle ou talentueuse à interagir avec des objets compliqués, notre connaissance de ces interactions – en particulier à un niveau quantitatif, est proche de zéro”, a déclaré Ying-Cheng Lai, un bon professeur de génie électrique à l’université d’État de l’Arizona ou au collège. . « Nous n’avons aucune capacité consciente d’analyser les influences particulières de facteurs extérieurs, comme le son ou le climat, sur ces interactions. ”
Pourtant, comprendre ces types de facteurs externes est vraiment un problème fondamental dans des domaines appliqués comme la robotique douce.
“Par exemple, dans la conception de prothèses intelligentes, il devient de plus en plus vital que vous intégriez des modes organiques de polyvalence qui imitent le mouvement naturel particulier associé aux membres humains”, a déclaré Brent Wallace, ancien étudiant de premier cycle de Lai’s et aujourd’hui doctorant. élève des institutions d’ingénierie Ira A. Fulton de l’ASU. « De telles améliorations rendent la prothèse plus confortable et naturelle pour le consommateur. ”
Sur la base de Lai, il est imaginable que, dans un avenir pas si lointain, des robots seront déployés dans diverses applications de manipulation ou de gestion d’objets complexes, qui nécessitent le type de coordination et de contrôle des mouvements que les êtres humains font assez bien.
Si un robot est amené à marcher avec une durée de foulée assez courte, des variations relativement importantes dans la régularité de la marche sont généralement autorisées. Cependant, si une foulée plus longue est généralement souhaitée, la fréquence de marche doit être choisie avec soin.
Un tout nouvel article publié dans Examen corporel appliqué , « Transition synchrone au sein de la gestion d’objets complexes », a été créée avec Wallace dans le cadre de leur tâche de conception principale en architecture électrique, supervisée par Lai. Wallace a obtenu une bourse d’études supérieures de la NSF et est maintenant doctorant au sein de l’école de l’ASU en ingénierie électrique, informatique et énergétique.
La recherche de l’équipe de l’ASU s’étend sur la nouvelle étude virtuelle révolutionnaire récemment réalisée par des chercheurs de la Northeastern University, utilisant le paradigme de la tasse de café et l’ajout d’une balle en mouvement, pour examiner exactement comment les humains manipulent l’objet complexe. Les individus ont délibérément tourné la coupe en particulier de manière rythmique avec la possibilité de différer la force et le taux de récurrence pour s’assurer que la balle reste contenue.
L’étude particulière du nord-est a démontré que les participants choisissent souvent une technique à basse ou à haute fréquence – mouvement rythmique de la tasse – pour manipuler un objet compliqué.
Une découverte étonnante est que chaque fois qu’une stratégie à basse fréquence a été utilisée, les oscillations présentent une synchronisation en phase, mais une synchronisation en antiphase survient lorsqu’une stratégie à haute fréquence a été utilisée.
“Puisque les basses et les hautes fréquences sont efficaces, il est imaginable que certaines personnes dans le test virtuel aient changé de stratégie”, a déclaré Wallace. « Cela soulève des questions.
« Comment s’effectue le passage de la synchronisation en phase d’une stratégie basse fréquence à la synchronisation antiphase associée à une stratégie haute fréquence, ou inversement ? », a demandé Wallace. « Dans l’espace des paramètres particuliers, la frontière entre les régimes de synchronisation en phase et en antiphase pourrait-elle être nette, continue ou sophistiquée ? ”
Les recherches de l’équipe ASU, motivées par l’intérêt de Wallace, ont étudié le basculement entre la synchronisation en phase et en antiphase en utilisant un type dynamique non linéaire d’un pendule monté sur un chariot mobile soumis à un forçage externe régulier.
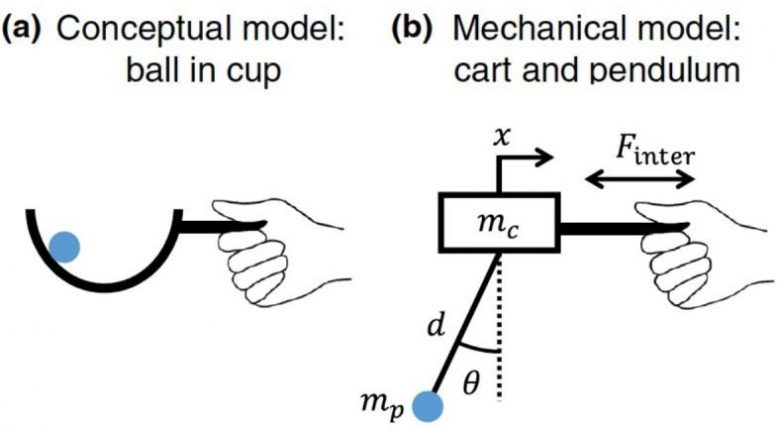
Une illustration schématique du système chariot-pendule pour imiter la manipulation par un humain d’un objet complexe, tel qu’une tasse associée à du café chaud : (a) un type conceptuel d’une balle se déplaçant à l’intérieur d’un verre circulaire et (b) la mécanique non linéaire type de pendule monté sur un chariot mobile, auquel se réfère mathématiquement un ensemble d’équations d’engrenage. Crédit : Université d’État d’Az
Les experts ont constaté que, dans la routine de forçage faible, comme la fréquence de génération externe est variable, la transition peut être abrupte et se produit à la fréquence associée à la résonance, ce qui peut être complètement compris en utilisant le concept de contrôle des systèmes geradlinig.
Au-delà de ce régime particulier, une zone de transition apparaît entre la synchronisation en phase plus antiphase, dans laquelle les mouvements du chariot et du pendule ne sont certainement pas synchronisés. Il était également disponible qu’il existe une bistabilité à l’intérieur et à proximité de la région de transition du côté des basses fréquences.
En général, les résultats indiquent que les humains seront capables de passer brusquement et efficacement d’un attracteur synchrone à un autre, un système qui peut être exploité pour concevoir des programmes automatisés intelligents pour gérer de manière adaptative des objets complexes dans un environnement en évolution.
« Il est possible que les humains soient capables d’utiliser magistralement les stratégies en phase et en antiphase et de passer facilement d’une stratégie à une autre, peut-être sans s’en rendre compte également. Les résultats particuliers de cette recherche peuvent être utilisés pour mettre en œuvre ces types de compétences humaines directement dans des robots mous, ainsi que des applications dans d’autres domaines, tels que la rééducation et l’interface cerveau-machine », a déclaré Lai.
De plus, des tâches aussi insignifiantes que l’utilisation de câbles dans la carrosserie d’un véhicule sur une ligne de montage – que les humains effectuent généralement sans effort – restent toujours à l’écart des machines les plus avancées.
« Une compréhension quantitative systématique de la façon dont les gens interagissent de manière dynamique en utilisant leur environnement changera de façon permanente la façon dont nous professionnalisons notre monde, et pourrait améliorer la conception de prothèses intelligentes et inaugurer une nouvelle ère associée à la fabrication et aux logiciels », a déclaré Wallace. « En imitant les comportements dynamiquement favorables particuliers adoptés par les êtres humains lors de la manipulation d’objets compliqués, nous serons capables d’automatiser des processus que l’on croyait auparavant impossibles. ”
Référence : « Synchronous Transition in Complicated Object Control » simplement par Brent Wallace, Ling-Wei Kong, Armando Rodriguez et Ying-Cheng Lai, 7 septembre 2021, Examen physique réel appliqué .
DOI : 10. 1103/PhysRevApplied. seize. 034012
D’autres auteurs sont Ling-Wei Kong et Armando Rodriguez, également de l’ASU.