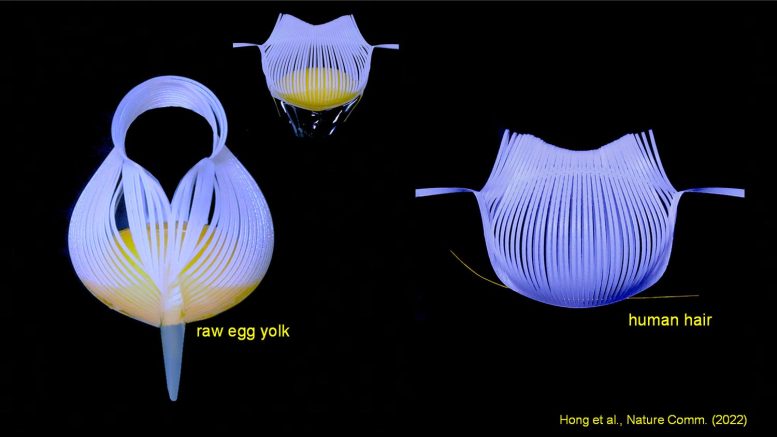
Des chercheurs en ingénierie de l’Université d’État de Caroline du Nord ont mis au point un nouveau type de pinces robotiques flexibles capables de soulever des jaunes d’œufs délicats sans les casser, et suffisamment précises pour soulever un cheveu humain. Crédit : Jie Yin, North Carolina State University
Des chercheurs en ingénierie de l’Université d’État de Caroline du Nord ont fait la démonstration d’un nouveau type de pinces robotiques flexibles capables de soulever des jaunes d’œufs délicats sans les casser, et suffisamment précises pour soulever un cheveu humain. Ces travaux ont des applications pour la robotique douce et les technologies biomédicales.
Ces travaux s’inspirent de l’art du kirigami, qui consiste à découper et à plier des feuilles de matériau bidimensionnel (2D) pour former des formes tridimensionnelles (3D). Plus précisément, les chercheurs ont mis au point une nouvelle technique qui consiste à utiliser le kirigami pour convertir des feuilles 2D en structures 3D incurvées en découpant des fentes parallèles sur une grande partie du matériau. La forme finale de la structure 3D est déterminée en grande partie par la limite extérieure du matériau. Par exemple, un matériau 2D qui a une limite circulaire formera une forme 3D sphérique.
“Nous avons défini et démontré un modèle qui permet aux utilisateurs de travailler à rebours”, explique Yaoye Hong, premier auteur d’un article sur ces travaux et étudiant en doctorat à NC State. “Si les utilisateurs savent de quel type de structure 3D incurvée ils ont besoin, ils peuvent utiliser notre approche pour déterminer la forme des limites et le motif des fentes qu’ils doivent utiliser dans le matériau 2D. Et un contrôle supplémentaire de la structure finale est rendu possible en contrôlant la direction dans laquelle le matériau est poussé ou tiré.”
“Notre technique est beaucoup plus simple que les techniques précédentes de conversion de matériaux 2D en structures 3D courbes, et elle permet aux concepteurs de créer une grande variété de structures personnalisées à partir de matériaux 2D”, explique Jie Yin, auteur correspondant de l’article et professeur associé d’ingénierie mécanique et aérospatiale à NC State.
Les chercheurs ont démontré l’utilité de leur technique en créant des pinces capables de saisir et de soulever des objets allant du jaune d’œuf au cheveu humain.
“Nous avons montré que notre technique peut être utilisée pour créer des outils capables de saisir et de déplacer même des objets extrêmement fragiles”, déclare Yin.
“Les pinces conventionnelles saisissent fermement un objet – elles saisissent les choses en exerçant une pression sur elles”, explique Yin. “Cela peut poser des problèmes lorsqu’on tente de saisir des objets fragiles, comme des jaunes d’œufs. Mais nos pinces entourent essentiellement l’objet, puis le soulèvent, un peu comme nous entourons un objet avec nos mains. Cela nous permet de ‘saisir’ et de déplacer des objets même délicats, sans sacrifier la précision.”
Cependant, les chercheurs notent qu’il existe une foule d’autres applications potentielles, comme l’utilisation de la technique pour concevoir des technologies biomédicales qui épousent la forme d’une articulation – comme le genou humain.
“Pensez à des bandages intelligents ou à des dispositifs de surveillance capables de se plier et de se déplacer avec votre genou ou votre coude”, explique Yin.
“Il s’agit d’un travail de preuve de concept qui montre que notre technique fonctionne”, dit Yin. “Nous sommes en train d’intégrer cette technique dans les technologies de robotique douce pour relever les défis industriels. Nous étudions également comment cette technique pourrait être utilisée pour créer des dispositifs permettant d’appliquer de la chaleur au genou humain, ce qui aurait des applications thérapeutiques”.
“Nous sommes ouverts à la collaboration avec des partenaires industriels pour explorer des applications supplémentaires et trouver des moyens de faire passer cette approche du laboratoire à une utilisation pratique.”
Référence : ” Boundary curvature guided programmable shape-morphing kirigami sheets ” par Yaoye Hong, Yinding Chi, Shuang Wu, Yanbin Li, Yong Zhu et Jie Yin, 26 janvier 2022, Nature Communications.
DOI: 10.1038/s41467-022-28187-x
L’article sera publié dans le journal Nature Communications le 26 janvier. L’article est co-écrit par Yong Zhu, professeur émérite Andrew A. Adams d’ingénierie mécanique et aérospatiale à NC State, et par Yinding Chi, Shuang Wu, Yanbin Li, tous étudiants en doctorat à NC State. Ces travaux ont été réalisés avec le soutien de la National Science Foundation dans le cadre des subventions 2005374 et 2013993.