Une équipe de chercheurs américains a mis au point un essaim reconfigurable de robots à quatre pattes identiques et peu coûteux – dotés de pattes et d’une queue flexibles sur le plan directionnel – qui peuvent être reliés à la demande et de manière autonome.
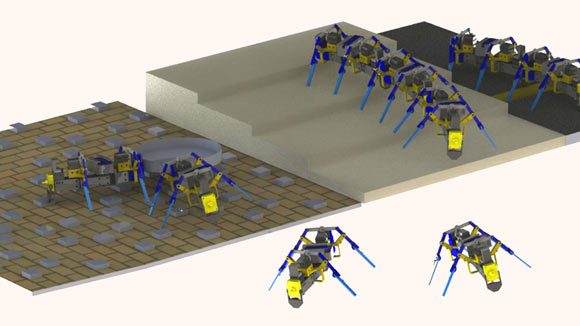
Ozkan-Aydin & ; Goldman ont montré par une série d’expériences qu’un essaim de robots à pattes enchaînables est capable de se déplacer dans des environnements difficiles et d’accomplir des tâches complexes qui ne sont pas réalisables par des robots individuels. Crédit image : Université de Notre Dame.
“Les robots à pattes peuvent naviguer dans des environnements difficiles tels que les terrains accidentés et les espaces restreints, et l’utilisation des membres offre un soutien efficace du corps, permet une manœuvrabilité rapide et facilite le franchissement des obstacles”, a déclaré le Dr Yasemin Ozkan-Aydin, ingénieur en robotique au département de génie électrique de l’Université de Notre Dame et à l’école de physique du Georgia Institute of Technology.
“Cependant, les robots à pattes sont confrontés à des défis de mobilité uniques dans les environnements terrestres, ce qui entraîne une réduction des performances locomotrices.”
Pour l’étude, le Dr Ozkan-Aydin et son collègue, le professeur Daniel Goldman du Georgia Institute of Technology, ont émis l’hypothèse qu’une connexion physique entre les robots individuels pourrait améliorer la mobilité d’un système collectif terrestre à pattes.
Les robots individuels ont effectué des tâches simples ou de faible envergure, comme se déplacer sur une surface lisse ou transporter un objet léger, mais si la tâche dépassait les capacités de l’unité individuelle, les robots se connectaient physiquement les uns aux autres pour former un système multi-pattes plus grand et surmonter collectivement les problèmes.
“Lorsque les fourmis collectent ou transportent des objets, si l’une d’entre elles rencontre un obstacle, le groupe travaille collectivement pour surmonter cet obstacle”, a déclaré le Dr Ozkan-Aydin.
“S’il y a un espace dans le chemin, par exemple, elles formeront un pont pour que les autres fourmis puissent le traverser – et c’est ce qui a inspiré cette étude.”
“Grâce à la robotique, nous sommes en mesure de mieux comprendre la dynamique et les comportements collectifs de ces systèmes biologiques et d’explorer comment nous pourrions être en mesure d’utiliser ce type de technologie à l’avenir.”
À l’aide d’une imprimante 3D, les scientifiques ont construit des robots à quatre pattes mesurant 15 à 20 cm (6-8 pouces) de long.
Chacun était équipé d’une batterie au lithium-polymère, d’un microcontrôleur et de trois capteurs : un capteur de lumière à l’avant et deux capteurs tactiles magnétiques à l’avant et à l’arrière, permettant aux robots de se connecter les uns aux autres.
Les quatre pattes flexibles réduisent le besoin de capteurs et de pièces supplémentaires et confèrent aux robots un niveau d’intelligence mécanique, ce qui les aide à interagir avec des terrains accidentés ou irréguliers.
“Vous n’avez pas besoin de capteurs supplémentaires pour détecter les obstacles, car la flexibilité des jambes permet au robot de les contourner”, a déclaré le Dr Ozkan-Aydin.
“Ils peuvent tester les lacunes d’un chemin, en construisant un pont avec leur corps ; déplacer des objets individuellement ; ou se connecter pour déplacer des objets collectivement dans différents types d’environnements, pas différents des fourmis.”
Les chercheurs ont testé leurs robots sur de l’herbe, du paillis, des feuilles et des glands.
Les robots ont également été testés sur de la moquette à poils longs, et des blocs de bois rectangulaires ont été collés sur des panneaux de particules pour servir de terrain accidenté.
Lorsqu’une unité individuelle était bloquée, un signal était envoyé à d’autres robots, qui s’unissaient pour fournir un soutien afin de traverser les obstacles avec succès tout en travaillant collectivement.
“Il y a encore des améliorations à apporter à notre conception”, a déclaré le Dr Ozkan-Aydin.
“Mais nous nous attendons à ce que les résultats éclairent la conception d’essaims à pattes à faible coût qui peuvent s’adapter à des situations imprévues et effectuer des tâches coopératives réelles telles que des opérations de recherche et de sauvetage, le transport collectif d’objets, l’exploration spatiale et la surveillance environnementale.”
Les travaux de l’équipe ont été publiés dans la revue Science Robotics.